


码垛机器人如何利用传感器进行定位的
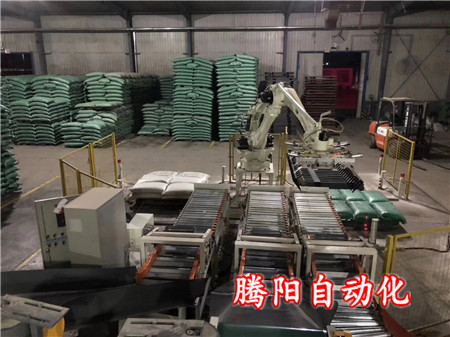
码垛机器人是指从事码垛工作的工业机器人,它把已经装载的物品按规则排好队,放在托盘或其它装载工具上。柔性抓持作业是通过在法兰装上不同类型的抓取机构来实现的。
该码垛机器人具有结构简单、故障率低、性能稳定、维修方便的特点。通常采用4轴的形式,总占地面积小,适用力强,能耗低,只要在起点上进行定位抓口和摆放点,教法简单易懂。码垛机器人一般只能完成平移和码垛工作,而自动码垛程序可以通过软件设定。码垛机器人是如何定位抓取点,并进行摆放点的呢?
工业机器人在过去70年中进行了大量的运动。众所周知,码垛机器人具有很强的识别能力,能自动地识别出产品的位置,并将其抓放到合适的位置。码垛机器人能利用各种不同的传感器,了解码垛机自身在工作空间的位置,对机器人手臂上的各个部分进行测量,将其定位于三维空间。
自动生产过程中,需要使用各种不同的传感器对生产过程中的各参数进行监控,以使设备处于良好的工作状态,保障产品的质量。当前主要依靠的是内部传感器,如各种位移、速度、压力等传感器,针对码垛机器人在监测系统运行状态、码垛过程、产品稳定等方面的要求,提出了将多传感器信息融合技术应用于码垛系统,并在此基础上提出了一种基于信息融合技术的理论知识,总结出了码垛系统多传感器信息融合的基本原理、结构形式及信息融合故障检测方法。采用多传感器对信息数据进行采集处理,码垛机在码垛过程中实现了机器人的识别、夹紧、码垛自动控制,提高了机器人的工作效率,增强了自动码垛机器人的性能,降低了人力物力损失。
对于不同货物的码垛、拆垛工作,码垛机器人均能顺利完成,而且设备的使用和维护也相对简单。
码垛机器人如何利用传感器进行定位的
码垛机器人如何利用传感器进行定位的 2021-8-23 本文被阅读 1453 次
| 上一条:能提高工厂生产效率的机器人码垛 | 下一条:塑料颗粒拆包投料机器人自动完成拆包投料 |

